 2014, Vol. 57
2014, Vol. 57


2. 中国石油集团东方地球物理公司, 河北涿州 072751;
3. 中国科学院大学, 北京 100049
2. BGP, CNPC, Zhuozhou 072751, China;
3. University of Chinese Academy of Sciences, Beijing 100049, China
瞬变电磁法(Transients Electromagnetic Method,TEM)起源于20世纪50—60年代,它利用接地电极或不接地回线向地下发射双极性脉冲电流,即为一次场,地下介质在其激发下的感应涡流产生随时间变化的二次场.在一次场的间歇期,使用接收线圈测量磁场信号,通过对二次场信号的提取和分析,从而达到探测地下地质体的目的(Nabighian et al., 1988),目前作为主要的非地震方法之一,广泛应用于油气、矿产等地下资源探测领域(Fitterman et al., 1986;Meju et al., 2002;嵇艳鞠等,2005;He et al., 2012).
目前主流TEM仪器包括加拿大Geonics公司PROTEM系列、Phoenix-Geophysics公司V8、澳大利亚Monex GeoScope公司TerraTEM和美国Zonge公司GDP-32等,前3家公司接收磁传感器均采用空心线圈方式实现,Geonics公司3D-3LF Coil尺寸为60 cm×60 cm×20 cm,重量为16 kg,有效面积为200 m2.凤凰公司TEM接收线圈直径为1.1 m,重量为12 kg,有效面积为100 m2.TerraTEM接收线圈尺寸为70 cm×70 cm× 25 cm,重量为9.5 kg,线圈部分有效面积为125 m2. 由电磁感应原理可知频率越低线圈感应信号越弱,空心线圈为了达到TEM勘探需求的灵敏度,往往体积与重量偏高,不利于野外大规模施工作业.Zonge公司TEM/3采用铁氧体磁芯结构,线圈部分有效面积为300 m2,直径11 cm,长度61 cm,重量4.5 kg.相对于空心线圈,TEM/3体积和重量显著减小,但其线圈有效面积偏小,灵敏度偏低,仅仅能够用于地下中浅目标探测,对于深部油气资源领域,低频分辨率差,无法获取深部目标消息.综上所述,现有TEM接收线圈由于重量、体积和灵敏度等原因,无法满足深部资源探测和三维电磁勘探新要求.
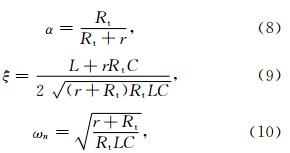
近年来,国内外有多篇感应式磁场传感器的研 究成果发表(Lukoschus,1979;Ripka,2001;Tumanski,2007;Yan,2013),如Sé ran等(2005)设计制作星载三轴磁场传感器,重量为430 g,噪声水平为 10pT/ @1 Hz,30fT/@300 Hz,工作频率范围为1 Hz~20 kHz.Grosz等(2010,2011)设计三轴磁场传感器,尺寸为72 mm×69 mm×69 mm,噪声 水平为12 pT/ @1 Hz,工作频率范围为20 mHz~7 Hz. 朱万华等(2013)研制基于磁通负反馈的高灵 敏度磁场传感器,长度为96 cm,重量≤6 kg,噪声 水平为1.5 pT/ @0.1 Hz,0.15 pT/ @1 Hz,30 fT/ @10 Hz,工作频率范围为1 mHz~1 kHz. 这些研究成果可应用于空间磁场、磁异常探测和大地电磁测深等领域,但均为频率域磁场传感器,其响应曲线在频域上随频率非线性变化,无法满足时间域电磁方法勘探需求.
@1 Hz,30fT/@300 Hz,工作频率范围为1 Hz~20 kHz.Grosz等(2010,2011)设计三轴磁场传感器,尺寸为72 mm×69 mm×69 mm,噪声 水平为12 pT/ @1 Hz,工作频率范围为20 mHz~7 Hz. 朱万华等(2013)研制基于磁通负反馈的高灵 敏度磁场传感器,长度为96 cm,重量≤6 kg,噪声 水平为1.5 pT/ @0.1 Hz,0.15 pT/ @1 Hz,30 fT/ @10 Hz,工作频率范围为1 mHz~1 kHz. 这些研究成果可应用于空间磁场、磁异常探测和大地电磁测深等领域,但均为频率域磁场传感器,其响应曲线在频域上随频率非线性变化,无法满足时间域电磁方法勘探需求.
国内有多家单位开展TEM磁场传感器研究,如吉林大学、中国地质科学院-地球物理地球化学勘查研究所和浙江大学等.吉林大学对TEM磁场传感器研究如M-1航电系统,钱镔(1982),衣汉权(1983)讨论接收线圈频率响应计算,并依据误差等值曲线,选定线圈合适谐振频率4.5 kHz,匹配系数为0.9;谭飞亚(2010)介绍TEM空心接收线圈部分理论,包括接收线圈频率响应,匹配方式,放大电路与线圈级联噪声分析;Chu等(2012)设计等效接收面积2000 m2,谐振频率34 kHz TEM空心线圈,采用双层屏蔽来抑制外界噪声,采用欠阻尼匹配来扩展线性频率响应范围.浙江大学王华军(2010)讨论线圈阻尼系数对瞬变接收线圈频率响应影响.综上所述,国内学者对于TEM磁场传感器的设计还有一些不足:(1)普遍认为临界阻尼为最佳匹配状态(王华军,2010;王世隆等,2011),也有学者提出或已经采用欠阻尼匹配方式拓展传感器线性频率响应范围,在实验中调整为欠阻尼匹配(钱镔,1982;Chu et al., 2012),可对传感器线性频率响应特点缺乏理论分析,未能从理论上得到最优化匹配系数范围;(2)使用低噪声放大电路来降低传感器噪声(谭飞亚,2010),未从线圈和电路作为整体考虑传感器噪声分布特点,采用噪声匹配方式提升传感器性能.
在国内外现有工作基础上,本文总结了TEM接收磁场传感器设计理论和方法.首先,分析传感器归一化谐振频率和不同匹配系数状态下幅频与相频响应,数值分析其线性误差分布,得到幅度线性误差最小与相位误差最小对应的匹配系数范围(0.71~0.86),该方法可用于TEM磁场传感器线性频率响应设计;其次,分析传感器整体噪声模型,提出传感器放大电路等效输入电压和电流噪声与线圈参数最佳噪声匹配状态,分析不同频段上传感器噪声性能主要决定因素,该方法可用于TEM磁场传感器噪声性能设计;最终,根据上述设计理论与方法,新研制的高磁导率磁芯TEM感应式磁场传感器,线圈 部分有效面积为1600 m2,线性工作频段为10 mHz~1 kHz,等效输入噪声水平为4pT/ @1 Hz,15 fT/ @200 Hz,传感器直径50 mm,长度800 mm,重量3.2 kg,相比现有TEM接收磁场传感器,体积和重量更占优势、工作频段更低.并且,使用多支该磁场传感器进行了野外作业,测试结果表明:新研制的高灵敏度TEM磁场传感器更加适合大深度、3D阵列电磁勘探,在我国深部资源勘探等领域具有良好应用前景.2 TEM感应式磁场传感器设计理论 2.1 TEM磁场传感器频率响应设计
TEM感应式磁场传感器内部主要分为两个部分,即接收线圈与放大电路,相比于接收线圈有限带宽,放大电路可以视为宽带恒定增益放大器.其等效电路模型如图 1所示.
 | 图 1 TEM磁场传感器的等效电路图Fig. 1 Equivalent electrical circuit of a magnetometer |
其中Vs为线圈感应电压,L为线圈等效电感,r为线圈内阻,C为线圈分布电容,Rt为匹配电阻.频率域磁场传感器一般采用磁通负反馈(朱万华等,2013)或者电流放大电路来抑制线圈谐振,拓展可用频带范围,这两种方法对于TEM磁场传感器并不适用.
基于法拉第电磁感应原理,传感器内部接收线圈感应电压为

在频率域,线圈感应电压为

由图 1可知,线圈感应信号经过线圈与匹配阻抗网络,通过放大电路放大,最终作为传感器输出,已假设放大电路为宽带恒定增益放大器,因此在放大器输入端信号为


由式(3)可知,线圈实际输出电压信号Vin,是原始磁场感应信号Vs经过线圈等效二阶网络H(ω)后输出.
从信号无失真角度考虑,要求二阶网络满足线性时不变系统要求(Oppenheim et al,1996),由此可得线圈传递函数形式应为

参照式(5),线圈等效网络传递函数式(4)可分为幅频与相频响应:
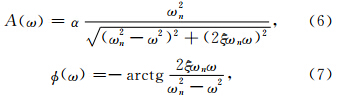


此时式(11)和式(12)满足线性时不变传递函数的条件式(5),即在频率低时线圈传递函数满足线性时不变要求,此时原始感应信号无失真传输,当频率增加时,线圈传递函数逐渐偏离此线性响应范围,此时原始感应信号发生畸变,因此分别以传递函数幅度和相位与线性时不变响应差值作为线性误差量化函数:
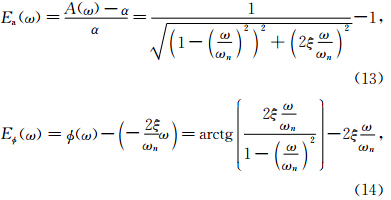
图 2中,匹配系数选取范围为0.5~1.2,归一化谐振频率范围为0~1.由图 2可知,幅度与相位无误差曲线起始于不同匹配系数,分别为0.71与0.86,且随频率增加零误差曲线所对应匹配系数呈下降趋势,即不存在某个固定匹配系数能同时保证幅度与相位线性误差为零,也不存在某个固定的匹配系数使得全频率范围内误差恒定,且由曲线的密 集程度变化可知,当频率接近传感器线圈无阻尼自然衰减频率ωn时,线性误差迅速扩大.整体考虑最合适的匹配系数范围,当TEM磁场传感器匹配系数选择为0.71~0.86范围内时,相比于临界阻尼匹配,即ξ=1,在整个频带内能同时保证幅度与相位线性误差最小,降低了接收线圈非线性误差,即在不改变线圈参数的条件下,采用欠阻尼匹配(0.71~0.86)相比于临界阻尼匹配有效拓展了线性频率范围.匹配系数为0.71时为幅度线性误差最小,匹配系数为0.86时相位线性误差最小.
瞬变接收线圈的匹配状态影响了其线性工作频率范围,对于同样线圈采用不同匹配方式可能会获得截然不同结果,本节详细分析了线圈传递函数对于线圈感应信号影响,从线性时不变系统角度,定量分析了线圈不同匹配系数下线性误差,指出了相位和幅度误差最小对应匹配系数范围,可以用于TEM磁场传感器设计.
 | 图 2 线圈传递函数误差曲线图Fig. 2 Amplitude(solid line) and phase(dotted line)error of magnetometer transfer function |
张爽等(2014)同样提出了欠阻尼最佳匹配方式,最佳匹配范围为0.8~0.9,这与文中匹配系数为0.86时相位线性误差最小的结论不谋而合.且由下文国外商用TEM磁场传感器测试结果可知,国外商用TEM磁场传感器已经使用欠阻尼作为传感器的匹配方式,其匹配系数满足0.71~0.86的最佳匹配系数范围. 2.2 TEM磁场传感器噪声分析
TEM磁场传感器噪声水平决定了其探测性能,是TEM磁场传感器的关键性能参数之一,其内部等效噪声源分布如图 3所示,TEM磁场传感器主要噪声来源为放大电路等效输入电压噪声ev、等效输入电流噪声ei、线圈内阻热噪声er和匹配电阻热噪声eRt,如图 3所示.
 | 图 3 TEM磁场传感器噪声模型Fig. 3 Equivalent circuit of magnetometer with noise sources |
由图 3可知,在放大电路输入端,各个噪声源贡献分别为
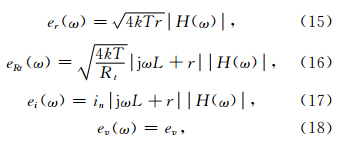


由于选择合适匹配系数使线圈线性误差最小,不妨假设在谐振频率范围内,|H(ω)|≈1.由式(15)—式(18)可知,线圈热噪声er和电路输入电压噪声ev不随频率变化.当频率低时,|jωL| r,此时匹配阻抗噪声eRt和电路电流噪声ei为固定值,由于线圈内阻一般较小,此时远小于er和ev,当频率上升时,|jωL|
r,此时匹配阻抗噪声eRt和电路电流噪声ei为固定值,由于线圈内阻一般较小,此时远小于er和ev,当频率上升时,|jωL| r,此时eRt和ei随频率线性上升,最终超过ev和er,成为主要的噪声来源.因此,按频率范围划分,输入噪声来源主要为两部分,在低频段,主要噪声源为放大电路输入电压噪声ev和线圈热噪声er,在高频段,为放大电路电流噪声ei和匹配阻抗噪声eRt.
r,此时eRt和ei随频率线性上升,最终超过ev和er,成为主要的噪声来源.因此,按频率范围划分,输入噪声来源主要为两部分,在低频段,主要噪声源为放大电路输入电压噪声ev和线圈热噪声er,在高频段,为放大电路电流噪声ei和匹配阻抗噪声eRt.
由以上讨论可知,在每个频段内主要噪声源都可以分为线圈与电路两部分组成,因此要降低传感器整体噪声需要联合考虑线圈参数与放大电路的参数.应用于TEM磁场传感器的放大电路,通过式(15)—式(18)可知,在噪声匹配条件下,电路噪声参数应为

实际上(21)与式(22)很难同时满足,新研制的TEM磁场传感器的线圈内阻为1.2 kΩ,匹配阻抗为700 kΩ时,需要对应的放大电路的电压噪声为4.5 nV/ ,电流噪声为0.15 pA/ .目前集成放大芯片很难保证电压与电流噪声同时满足此要 求,比如常用LT1028电压噪声为1 nV/ @10 Hz,电流噪声为1.0 pA/ @1 kHz,电流噪声偏高.
进一步计算TEM磁场传感器等效输入磁场噪声水平,依据有磁芯线圈电感经验公式(Lukoschus et al., 1979)


TEM磁场传感器噪声水平影响其测深能力,分析传感器各个噪声来源,针对优化设计线圈与电路参数,能够取得良好效果.式(24)和式(25)是对于有磁芯线圈等效输入磁场噪声水平,不适用于空心接收线圈,但噪声源在不同频段的分布特点不变,同 样可以用于指导空心线圈的电路与线圈的匹配设计. 3 TEM磁场传感器测试
在上述设计理论指导下,采用高磁导率磁芯线圈结构,磁芯长度为15 mm×15 mm×600 mm,线圈分为12节,每节2000圈,总匝数为24000圈,线圈部分内阻为1.2 kΩ,电感为103 H,有效面积约为1600 m2,工作频率范围为10 mHz~1 kHz.放大电路使用INA115仪表放大电路,其电压噪声为15 nV/ ,电流噪声为0.2 pA/ @1 kHz.传感器谐振频率为1.6 kHz,匹配阻抗为700 kΩ,按式(21)与式(22)计算,电路电压噪声偏高,电流噪声符合设计要求.最终完成的TEM传感器整体直径50 mm,长度800 mm,重量3.2 kg.
目前国内外商用化TEM磁场传感器灵敏度带宽以及噪声水平各不相同,本次TEM磁场传感器对比测试传感器为应用较为广泛的Geonics公司 3D-3LF Coil、Zonge公司TEM/3和Monex GeoScope 公司的TRC-1.CAS-50(即新研制的TEM磁场传感器)与TEM/3使用Pulz(2002)制作标定系统,标定线圈直径38 cm,长度4.5 m,在标定线圈中心区域直径10 cm,长度2.5 m范围能保证0.1%均匀度,工作频率范围为0.01 Hz~100 kHz.由于3D-3LF Coil与TRC-1尺寸(60 cm×60 cm×20 cm和70 cm×70 cm×25 cm)限制,使用Serviciencia,S.L.(2013)公司三轴Helmholtz标定线圈,3D-3LF Coil为三轴线圈,其三个方向灵敏度与带宽相同,因而只展示Z方向测试结果.由于标定频率越低耗费时间越长,且频率趋近零时,传感器频率响应线性度良好,因而实际标定起始频率为1 Hz,截止频率超过传感器本身谐振频率.
由图 4与表 1可知,国外商用TEM磁场传感器基本为欠阻尼匹配,为0.71~0.86区间内,只有TRC-1为临界阻尼匹配;国外商用TEM磁场传感 器接收面积(即灵敏度)偏小,谐振频率都大于10 kHz,适用于频率较高的应用场合.
 | 图 4 实测磁场传感器灵敏度曲线Fig. 4 Measured frequency response of magnetometers |
| | 表 1 CAS-50与国外商用TEM磁场传感器参数对比 Table 1 The Parameters of CAS-50 and Commercial TEM Magnetometers |
磁场传感器噪声水平测试环境为磁屏蔽室,屏蔽室内部磁场水平远低于磁场传感器等效输入磁场噪声水平,可以用于检测TEM磁场传感器噪声水平.考虑TEM磁场传感器内部电路增益较小,输出噪声水平低,使用低噪声放大器SR560,设定增益100放大TEM磁场传感器输出信号.测量仪器为动态信号分析仪Agilent 35670A,动态信号分析仪测量传感器在磁屏蔽室内输出电压噪声,除以SR560 增益和传感器灵敏度可得其等效输入磁场噪声水平.
TEM传感器噪声测试结果为图 5,对比频率范围为0.1 Hz~1 kHz.在整个频率范围内,新研制的 TEM磁场传感器优于国外商用产品,在10 Hz处,国外商用 产品中TEM/3噪声水平最低约为0.5 pT/ ,其次为3D-3LF,约为2pT,最后为TRC-1,约为3.5 pT/ .而新研制的磁场传感器噪声水平仅为0.2 pT .当频率低于1 Hz时,由于1/f噪声和传感器灵敏度的下降,TEM磁场传感器的噪声水平上升,TEM/3的噪声水平上升最快,3D-3LF与 TRC-1噪声水平相近.在1 Hz处,TEM/3,3D-3LF,TRC-1噪声水平最低为50 pT,而新研制的磁场 传感器仅为4 pT .在0.1 Hz处,国外商用TEM 磁场传感器噪声水平大于2 nT,新研制的磁场传感器为100 pT,远低于国外商用TEM磁场传感器噪声水平.
由图 5可知,新研制的磁场传感器噪声水平: 0.1 Hz时为100 pT/,1 Hz时为4 pT/,10 Hz时为0.2 pT/ @,大于200 Hz时为15 fT/ .
 | 图 5 磁场传感器等效输入噪声曲线Fig. 5 Measured equivalent input magnetic noise of magnetometers |
TEM磁场传感器灵敏度与噪声水平对比测试表明:新研制的TEM磁场传感器工作频率低(10 mHz~1 kHz),在低频灵敏度高(有效面积约为25000 m2),使用欠阻尼匹配使其在工作频率范围内能保证良好线性响应;在1 kHz以下频率范围,新研制TEM磁场传感器噪声水平低于国外商用TEM磁场传感器,在1 Hz以下噪声水平仅为国外商用TEM磁场传感器的十分之一,更加适合低频TEM勘探应用.4 野外试验测试
2013年,使用研制的磁场传感器在准噶尔盆地MH地区成功进行了生产应用.
MH地区近几年油气资源取得了重大突破,为加快该区勘探步伐,油田公司在该区部署了时频电磁勘探工作,目的是进一步查清含油砂体分布范围,辅助地震进行有利储层预测,提高油气预测可靠性,为该区下一步油气勘探部署提供依据.
图 6是采用新研制TEM磁场传感器进行数据采集、通过专业软件处理反演得到深度剖面,剖面从电性上清楚地刻画了勘探区地层结构,并与过剖面的几口钻井电阻率测井曲线揭示的电性变化特征一致,证明新研制TEM磁场传感器可靠性.
 | 图 6 MH地区电阻率二维深度剖面Fig. 6 Apparent resistivity-depth profile in MH area |
5.1 本文详细分析了TEM感应式磁场传感器设计方法,针对其频率响应要求线性,在接收线圈等效模型基础上详细分析了匹配系数对于接收线圈频率响应线性误差影响,指出了幅度与相位线性误差最小匹配系数范围0.71~0.86;针对接收线圈噪声性能要求,分析了接收线圈各个噪声源对总输入噪声贡献,指出了在不同频率范围主要噪声源,提出了接收线圈部分与放大电路部分噪声性能相匹配,有助于实现与接收线圈噪声匹配的低噪声放大电路设计.新研制了一款具有高磁导率磁芯的TEM感应 式磁场传感器,工作频带10 mHz~1 kHz,等效输 入噪声水平为4 pT/ @1 Hz,15 fT/ @200 Hz,尺寸为直径50 mm,长度800 mm,重量3.2 kg,相比于现有的TEM磁场传感器,体积、重量和噪声水平都有优势.并且由于其工作频率很低,更加适合大深度、3D阵列电磁勘探.
5.2 大功率瞬变电磁方法是深部油气资源勘探的 重要地球物理方法之一,用于该方法的高灵敏度磁场传感器一直是限制我国电磁勘探装备国产化的瓶颈技术,本文实现了自主研制的高灵敏度磁场传感器用于野外大规模的生产作业,这对我国地球物理装备研发具有重要意义.
5.3 由于电子电路中低频(10 Hz以下)存在1/f噪声,将对磁场传感器低频性能产生负面影响,如理论设计TEM磁场传感器在1 Hz噪声水平为2.5 pT,实际却为4 pT,0.1 Hz的噪声水平应为25 pT,实际测试为100 pT,如何降低1/f噪声对于TEM磁场传感器的影响将是下一步研究方向.
| [1] | Fitterman, D. and Stewart, M. 1986. Transient electromagnetic sounding for groundwater. Geophysics, 51(4): 995-1005.doi: 10.1190/1.1442158. |
| [2] | GroszA, Paperno E, Amrusi S, et al. 2010. Integration of the electronics and batteries inside the hollow core of a search coil. Journal of Applied Physics,107(9), 09E703. |
| [3] | Grosz A, Paperno E, Amrusi S, et al. 2011. A three-axial search coil magnetometer optimized for small size, low power, and low frequencies. Sensors Journal, IEEE, 11(4): 1088-1094. |
| [4] | He Z X, Zhao Z, Liu H Y, et al. 2012. TFEM for oil detection: Case studies. The Leading Edge, 31(5): 518-521.doi: 10.1190/tle31050518.1. |
| [5] | Ji Y J, Lin J, Zhu K G, et al. 2005. Underground water prospecting by transient electromagnetic method. Progress in Geophysics (in Chinese), 20(3): 828-833. |
| [6] | Lukoschus D G. 1979. Optimization theory for induction-coil magnetometers at higher frequencies. Geoscience Electronics, IEEE Transactions on, 17(3): 56-63. |
| [7] | Meju M A. 2002. Geoelectromagnetic exploration for natural resources: models, case studies and challenges. Surveys in Geophysics, 23(2-3): 133-206. |
| [8] | Nabighian M N, et al. 1988. Electromagnetic methods in applied geophysics-Theory Volume I. Society of Exploration Geophysicists, 1988. 313-503. |
| [9] | Oppenheim A V, Willsky A S, Nawab S H.1996, Signals & systems. 1996. Chapter 6. |
| [10] | Pulz E. 2002. A calibration facility for search coil magnetometers. Measurement Science and Technology, 13(5): N49. |
| [11] | Qian Bin. 1982. Time-domain analysis and parameter selection receiving coil of the M-1 AEM system. Journal of Changchun Geological College (in Chinese), 2:129-144. |
| [12] | Ripka, P. 2001. Magnetic sensors and magnetometers(Vol.8). Norwood: Artech house. |
| [13] | S ran H C, Fergeau P. 2005. An optimized low-frequency three-axis search coil magnetometer for space research. Review of scientific instruments, 76(4): 044502-044502-10. |
| [14] | Serviciencia,S.L. 2013. 1D, 2D and 3D Helmholtz Coils. . Available: http://www.serviciencia.es/Helm-i-1.htm |
| [15] | Tan Feiya. 2008. Development of TEM receiver coil (in Chinese). Changchun: Jilin University. |
| [16] | Tumanski S. 2007. Induction coil sensors—A review. Measurement Science and Technology, 18(3): R31-R46. |
| [17] | Wang H J. 2010. Characteristics of damping coefficient effect on transient electromagnetic signal. Chinese J. Geophys. (in Chinese), 53(2):428-434. |
| [18] | Wang S L, Wang Y Z, Sui Y Y, et al. 2011, A bird calibration device of Helicopter-borne TEM with concentric bucking loop. Chinese J. Geophys (in Chinese), 54(9): 2397-2406, doi: 10.3969/j.issn.0001-5733.2011.09.023. |
| [19] | Xingyu C, Shuang Z, Shudong C. 2012. An Optimal Transfer Characteristic of an Air Cored Transient Electromagnetic Sensor, Industrial Control and Electronics Engineering (ICICEE), 2012 International Conference on. IEEE, 482-485. |
| [20] | Yan B, Zhu W H, Liu L S, et al. 2013. An optimization method for Induction Magnetometer of 0.1 mHz to 1 kHz. Magnetics. IEEE Transactions on, 49(10): 5294-5300. |
| [21] | Yi Hanquan. 1983. Parameter selection for the receiving coil of the M-1 pulse type AEM system. Journal of Changchun Geological College (in Chinese), 1:123-134. |
| [22] | Zhang S, Liu Z X, Chen S D. 2014. Calibration study on the damping characteristics of TEM sensor. Chinese J. Geophys.(in Chinese), 57(2): 662-670,doi: 10.6038/cjg20140229. |
| [23] | Zhu W H, DI Q Y, Liu L S, et al. Development of search coil magnetometer based on magnetic flux negative feedback structure. Chinese J. Geophys. (in Chinese), 56(11): 3683-3689,doi: 10.6038/cjg20131109. |
| [24] | 嵇艳鞠,林君,朱凯光等.2005.利用瞬变电磁技术进行地下水资源勘察.地球物理学进展,20(3), 828-833. |
| [25] | 钱镔. 1982. M-1航电系统接收线圈的时域分析和参数选择. 长春地质学院学报,2:129-144. |
| [26] | 谭飞亚.2008.TEM接收线圈的研制[硕士论文]. 长春:吉林大学. |
| [27] | 王华军.2010. 阻尼系数对瞬变电磁观测信号的影响特征.地球物理学报, 53(2):428-434 |
| [28] | 王世隆,王言章,随阳轶等.2011. 同心补偿式直升机时间域航空电磁法吊舱校准装置研究.地球物理学报, 54(9): 2397-2406,doi: 10.3969/j.issn.0001-5733.2011.09.023 |
| [29] | 衣汉权. 1983. M-1型脉冲式航电仪接收线圈参数的选择. 长春地质学报,1983,1:123-134. |
| [30] | 张爽,刘紫秀,陈曙东.2014.瞬变电磁传感器阻尼特性的标定研究.地球物理学报,57(2): 662-670,doi:10.6038/cjg20140229. |
| [31] | 朱万华, 底青云, 刘雷松等.2013,基于磁通负反馈结构的高灵敏度感应式磁场传感器研制.地球物理学报, 56(11): 3683-3689,doi: 10.6038/cjg20131109. |