 2012, Vol. 55
2012, Vol. 55



2. 武汉大学地球空间环境与大地测量教育部重点实验室, 武汉 430079;
3. 中国科学院上海天文台, 上海 200030
2. Key Laboratory of Geoscience Environment and Geodesy, Ministry of Education, Wuhan University, Wuhan 430079, China;
3. Shanghai Astronomical Observatory, Chinese Academy of Sciences, Shanghai 200030, China
月球是距离地球最近的天然卫星,是人类进行太空探索最理想的中转基地与跳板,同时,月球上也蕴含着极其丰富的资源,可为人类的可持续发展提供资源储备.从20世纪50年代开始到70年代中期结束的月球探测活动主要集中在月球正面的中纬度地区,而对月球的高纬度区域和背面所获取的资料相对较少,这主要受当时技术条件的限制.近年来,随着欧空局Smart-1 探测器(2003)、日本Kaguya/Selene探测器(2007)、中国“嫦娥一号"和“嫦娥二号"探测器(2007,2010)、印度Chandrayaan-1 探测器(2008)和美国LRO 探测器(2009)的先后发射,全球掀起了新一轮的探月热潮,各国都明显加强了对月球背面和两极地区的研究.
月球是一个表面温度下的灰原体[1],表面温度受所吸收的太阳辐射和来自于月球内部热量的共同影响,但由于月球自身的热惯量非常之小,月球白天的温度主要由吸收太阳入射辐射来获取.月表没有大气的热传导,白天和夜晚的温差很大,白天温度约为400K,太阳不能照射到的阴影区和夜晚期间的月球表面温度只有约90 K[2].此外,月球旋转一周大约需要27.3天,白天和晚上持续达14天.持续的低温和较大的温差对月球车传感器选择和保护及月球基地站址选择提出了挑战.
月球赤道面与黄道面成1.54°夹角,加上物理天平动在纬度方向的影响(0.04°),纬度为88.4°以上的极区可以享受长时间的夏天时间[3],但是由于极区复杂的地形条件,地形对太阳光照条件影响十分显著.由于地形的影响,月球极区存在永久阴影区和寒冷凹地,寒冷凹地是极端低温区域,特别是在南极点附近,是太阳无法照射的阴影区.而在海拔比较高的区域,例如撞击坑的边缘、交错地带等,往往能得到充足的阳光照射.
月球极区光照条件的研究对人类重返月球具有重要的意义,可为月球车传感器设计、月面基地选择及水冰存在的进一步研究提供依据.一方面,光照良好的区域可以为探测仪器提供太阳能[4-5],及为月球热演化提供素材[6].Bussey等利用Clementine数据对极区光照条件进行了定量分析,建立了新的热演化模型[6].另一方面,永久阴影区,是大量水冰可能存在的区域,是寻找水冰踪迹开展撞月实验的首选区域[7-10].
对月球极区光照条件的研究主要有三种方法,一是根据月球探测器和地基雷达所获得的月球极区的数据来建立月面地形模型,同已知的相关月球轨道运行参数相结合,通过几何方法来建立月表光照模型.早期的探月计划并未得到极区完整和高精度的DEM,光照模型的精度有限[11-12].搭载在日本Kaguya/Selene上的激光高度计获取了月表高精度的DEM[13],并计算了极区光照条件模型[14],但计算周期只有2000天,没有考虑黄道和白道交点进动的影响;二是基于遥感影像建立光照模型,但其易受影像时间和空间分辨率的影响,特别是缺少极区寒冷冬季的影像[2, 15];三是仿真模型,文献[16]利用如石蜡等可压膜的物质,构建DEM 模型,利用聚光灯模拟太阳光束.
“嫦娥一号"探月卫星获取的激光高度计数据,可以用来建立全月面高精度的数字高程模型,特别是在两极地区,地形细节清晰可见,使研究月球极区太阳光照条件成为可能.本文以中国“嫦娥一号"获取的月面数字高程模型为基础,同已知的月球轨道参数相结合,考虑了黄道和白道交点进动的影响,采用地形最大高度角法来研究月球极区纬度87.5°以上区域的太阳光照条件.
2 数据概况2007年10 月24 日,我国首颗绕月探测卫星“嫦娥一号"在西昌卫星发射中心由“长征三号甲"运载火箭发射升空,在经历发射段、调相段、奔月段和三次近月点制动后,于2007年11月7日运行在距月球表面200km 的圆形极轨道上执行科学探测任务.“嫦娥一号"的四大科学目标分别是:获取月表三维影像、分析月球表面有用元素含量和物质类型的分布特点、探测月壤特性及探测地月空间环境.卫星搭载了八种科学探测仪器(即有效载荷),取得了初步的科学成果[17].获取全月面三维影像图是“嫦娥一号"的首要科学任务,卫星上搭载的激光高度计是实现月球表面三维影像的一个重要载荷,用于获取卫星到月面的距离数据,进行月表地形测绘.
“嫦娥一号"的轨道高度约为200km,激光高度计的测距频率为1 Hz,截止到2008 年12 月4 日,共获取了大约1000多轨探测数据,约912万个原始数据.文献[18]和[19]分别利用“嫦娥一号"从2007年11月28日到2008年1月22日第一次正飞阶段约2个月获取的321 万个有效激光测高数据和从2007年11 月28 日到2008 年12 月4 日获取的约912万个激光测高数据,得到了月表特别是极区的地形地貌特征.该地形模型所反映的地形细节层次分明、清晰可辨.本文中使用的月面地形模型CLTM-s03,是激光高度计数据经过时标漂移修正、早期月球重力场造成的轨道径向修正及CLTM-s01 地形模型与日本Kaguya/Selene地形模型之间的系统偏差修正后得到的,实现了对激光高度计数据的外部检核.CLTM-s03 模型的格网分辨率为0.25°×0.25°,在纬度为85°时,格网尺寸在纬度线方向上大约为660m.
3 建模方法研究本文以“嫦娥一号"获取的月球极区测高数据建立的月面地形模型为基础,同已知的月球运行轨道参数相结合,通过几何方法建立数学模型来研究月表太阳光照条件,计算过程如图 1 所示.第一,利用行星精密历表计算太阳相对于月心的位置坐标.通过坐标转换,将求得的J2000 月心天球坐标系下太阳位置坐标转换到月心月固坐标系下,得到太阳在月球上的星下点位置.第二,计算月球上格网点i的太阳高度角(计算点取DEM 格网点).极区的太阳高度角最大只有1.6°,而太阳的视半径近似为0.27°,计算太阳高度角时视半径是不可忽略的.如果太阳高度角小于0°,说明计算区域背离太阳,是黑暗区域,否则为太阳光照可以到达的区域.第三,判断格网点i在太阳照射方向上是否能被其他高地遮挡.如果计算区域中太阳方向上地形高程都在太阳视线以下,说明格网点i未被遮挡,即为光照区,否则为阴影区.最后,循环计算极区每个格网点在不同时间段的光照条件,可以求得极区各个位置的光照率.

|
图 1 月球极区光照模型计算流程图 Fig. 1 The calculation flow chart of lunar polar illumination model |
太阳高度角的空间分布随着时间变化而变化,定量反映了月表太阳光照的可达程度[20].
如图 2所示,φ 为点M处的太阳高度角,其计算过程如下:

|
图 2 太阳高度角计算示意图 Fig. 2 The calculation schematic diagram of elevation angle of the sun |
在ΔOSM中,

|
(1) |
而
|
(2) |
(1)和(2)式中,(φM,λM)和(φS′,λS′)分别为计算点M和太阳星下点S′的位置坐标,R为月球的平均半径,Rs-m为日月距离,由星历求得太阳位置坐标反算得到.根据(1)和(2)式即可求得M点的太阳高度角为

|
(3) |
顾及太阳的视半径,高度角为
|
(4) |
当由(4)式确定的太阳高度角为正时,说明该区域在太阳照射范围内,而当太阳高度角为负时,该区域背离太阳照射,为黑暗区,是太阳光照不可达的区域.
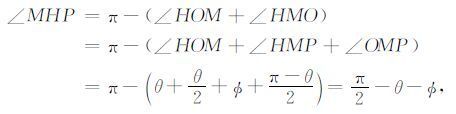
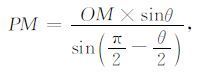
3.2 地形对太阳光照条件的影响在图 3中,假定由(4)式确定的太阳高度角为正,说明该区域在太阳照射范围内,判断点M是否被周围高地遮挡,主要取决于太阳光视线高度N′H与高地N的高程N′N的关系,当N′N>N′H,点M被点N遮挡,为阴影区,否则为光照区.

|
图 3 阴影区判定示意图 Fig. 3 Theschematic diagram of shadow determination |
N′H可通过图 3所示的几何关系得到,R为以月球的正球面为参考基准的平均半径,N′为高地点N在参考椭球上的投影点,由于

|
(5) |
|
(6) |
|
(7) |
|
(8) |
则

|
(9) |

|
(10) |
其中,太阳高度角φ 已包括了太阳的视半径0.27°,ON′和OM′夹角θ 可通过(2)式求得.上述地形对光照条件的影响分析,亦即视线追踪法的计算过程.严格地讲,光照条件的计算周期应该考虑黄道和白道交点进动的影响周期(18.6年),但视线追踪法在每个位置和每个时间点上都需要计算太阳光视线高度N′H和高地N的高程N′N,这个过程是相当耗时的.遵循视线追踪法思想,这里使用地形最大高度角法.
3.3 地形最大高度角法在某一时刻的计算点M上,地形最大高度角法[21]是通过比较该点的太阳高度角和与太阳照射同方向的地形最大高度角α 的关系来确定光照条件.将各个方向的地形最大高度角计算后存储在数据库中,这个过程只需计算一次,即可在不同的时间段上调用.图 4b为计算点M的地形最大高度角计算示意图,图 4c为在一个月球天内,不同方位的太阳高度角与地形最大高度角比较示意图,图中虚线代表太阳高度角,黑色阴影部分表示地形最大高度角,该图中大约有28%的太阳高度角大于地形最大高度角,即M点的光照率为28%.

|
图 4 地形最大高度角法 Fig. 4 The horizon method by comparing the solar elevation angle to the maximal elevation of the horizon |
在月球北极区域(70°N~90°N),本文中使用的DEM 模型提及的最低点高程为-4527 m,最高点高程为3330 m(以1737.4km 的圆球作为参考椭球).相似地,在南极区域(70°S~90°S),最低点高程为-7866m,最高点高程为7636m.在图 3中,月球极区的太阳高度角是很小的,即

|
地形最大高度角计算区域的范围可由下式估算得到:

|
即,地形最大高度角的计算半径为8°.
4 结果与讨论本文采用精密星历文件DE421 计算太阳的位置坐标,时间从2000年1月1日到2018年12月31日,计算时间间隔为24h.在计算地形最大高度角时,计算半径为8°,方位角间隔为5°,对于不同时刻,当太阳的方位角与数据库中的方位角不一致时,可根据此时的太阳方位角调用数据库中相邻方位角的地形最大高度角,并线性内插得到该方位的地形最大高度角.计算结果如下:
(1) 未发现持续光照区.
(2) 有长久阴影区存在,南极区的长久阴影区远多于北极区,如图 5所示.在纬度大于87.5°的区域,北极阴影区面积大约为903km2,南极区大约为2736km2.在南极区,这些长久阴影区主要分布在比较大且深的撞击坑,包括Shoemaker(88.1°S,44.9°E)、Shackleton (89.9°S,110°E)、Faustim(87.3°S,77°E)、Sverdrap(88.5°S,152°W)、De Gerlache(88.5°S,87.1°W)、Cabeus(84.9°S,35.5°W)和其他一些未命名的撞击坑,主要分布在(87.5°S,0.0°E)、(88.7°S,160°E)、(88.2°S,112°E)、(89.5°S,73°W).南极阴影区的分布基本与日本Kaguya/Selene分析结果[14]和Clementine影像结果[2]是一致的.在北极区,阴影区主要分布在一些较小的撞击坑和地势低凹处,如Whipple(89.12°N,118.24°E)、Byrd(85.3°N,9.8°E)和一个未命名的撞击坑(88°N,52°W).另外,还发现了一些零散的小范围的阴影区,主要分布在北极较大的撞击坑Peary(88.6°N,33°E)的底部一些较小的撞击坑和地势低凹处,集中在30°E~90°E范围内,这与文献[6]结果相一致.但需要特别提及的是,本文并未发现撞击坑Hinshelword(89.36°N,46.37°E)为长久阴影区.另外,经度在30°~90°和180°~300°之间的小阴影区是否为低温区还需要进一步证实,因为这些区域容易受到二次光反射及周围热能辐射的影响.

|
图 5 月球北极区(a)和南极区(b)长久阴影区分布图 Fig. 5 The result of the permanently shadowed regions for the north polar(a) and the south polar(b) |
(3) 在南极或北极的夏季[22],撞击坑边沿高地处可以享受到连续的光照.
寻找水冰的线索仍是当今探月的主要目标之一,美探测器在南极Cabeus区域实施了“撞月"实验,追寻到了大量水冰的踪迹,但月球上水冰和其他物质的浓度和分布情况还需要进一步的确定,这些都需要将来月球车登陆来进行实地考察和验证.
在月球极区,理想的着陆点选择要顾及以下几个方面[7]:一是在该点处能接受大量的太阳光照;二是着陆点应接近于几个大的长久阴影区,允许月球车对水冰的存在及其他物质进行探寻;三是探测区域要平整,面积足够大,没有撞击坑和砾石等.“嫦娥三号"及后续探月项目,将实现我国的月球车软着陆.根据上面月球车着陆顾及的几个方面,Shackleton撞击坑是极区着陆目标区之一.究其原因,一是该撞击坑接近南极点,撞击坑底部是太阳光终年照不到的地方,温度极低,为水冰的存在提供了可能.但Shackleton 撞击坑是否存在水冰存在争议,美国1998年发射“月球勘探者"探测器,探测器上搭载的中子分光计曾探测到包括Shackleton 在内的月球南极区氢元素浓度高,但一直不清楚氢元素是否以水冰的形式存在.日本Kaguya/Selene的地形照相机在探测期间抓拍到一次机会,拍摄到了Shackleton撞击坑底部,如果此处有水冰存在,那么水冰存在处对阳光的反射率应该比较高.但据文献[23]分析,Shackleton撞击坑底部并不存在这样的地方,这也可能说明该撞击坑内部可能没有水冰,或量极少,并与土壤混合或覆盖.因此,只有通过月球车近距离的采样和探测,才能对水冰是否存在、存在的形式及储量做出科学的预测.二是该撞击坑在靠近南极点的部分边缘高地处在南极的夏季能接受到持续的光照,全年平均光照率为83.7%,良好的太阳光照可为月球车储备充足的能量.三是Shackleton内侧的坡度大约为30°[23],在月球车的爬坡能力之内.但考虑到局部地形特征不同,具体地点的选择还需要更高精度的DEM 做支持.
5 结 论“嫦娥一号"激光测高数据提供了月球极区高精度的数字高程模型,为光照模型的建立提供了精确的数据基础.本文计算了极区纬度87.5°以上区域的光照条件,采用地形最大高度角法,并考虑了黄道和白道交点进动的影响,结论如下:
(1) 并没有发现持续光照的区域,但在月球南极或北极的夏季,在撞击坑靠近极点的区域可接受到持续的光照,此期间是月球车着陆和工作的最佳时间.
(2) 南极区域比北极区域有大面积的长久阴影区,主要集中在大而深的撞击坑.这些大而深的撞击坑相对于小的长久阴影区,不易受周围光照环境的影响,温度稳定,是水冰探测的理想区域.Shackleton撞击坑边沿处有长时间的光照,且阴影区面积较大,是极区着陆首选目标区之一.
本文得出的结论基本与已有文献的结论是一致的,但值得强调的是本文充分考虑了黄道和白道交点进动的周期对月球极区光照模型计算的影响.我国计划在嫦娥二期和三期实施月球探测时进行月球车登陆,本文建立的月球光照模型可为着陆点的选择提供依据.此外,将本文模型中太阳的位置参数转换为地球表面某月球车指挥控制站的位置参数,便可进一步分析月球车行进中的实时通讯是否会被月面地形造成阻挡.
致谢感谢中国科学院上海天文台提供的月球高精度DEM 模型,感谢日本国立天文台Hikida博士和上海航天技术研究院李云飞同志对本文的指导;本研究在武汉大学地球空间环境与大地测量教育部重点实验室完成;文中的部分插图使用了Generic Mapping Tools (GMT)[24-25]软件来实现;感谢评审人的修改意见.
| [1] | 欧阳自远. 月球科学概论. 北京: 中国宇航出版社, 2005 : 46 -47. Ouyang Z Y. Introduction to Lunar Science (in Chinese). Beijing: China Astronautic Publishing House, 2005 : 46 -47. |
| [2] | Bussey D B J, Spudis P D, Robinson M S. Illumination conditions at the lunar South Pole. Geophysical Research Letters , 1999, 26(9): 1187-1190. DOI:10.1029/1999GL900213 |
| [3] | Zuber M T, Smith D E. Topography of the lunar south polar region: implications for the size and location of permanently shaded areas. Geophysical Research Letters , 1997, 24(17): 2183-2186. DOI:10.1029/97GL02111 |
| [4] | Fincannon J. Lunar South Pole illumination: review, reassessment, and power system implications. //5th International Energy Conversion Engineering Conference and Exhibit (IECEC). St. Louis, Missour, 2007: 25-27. |
| [5] | Fincannon J. Lunar polar illumination for power analysis. //Sixth International Energy Conversion Engineering Conference (IECEC). Ohio, 2008: 5631. |
| [6] | Bussey D B J, Sorensen S A, Spudis P D. Illumination and temperature modelling of the lunar polar regions. // 40th Lunar and Planetary Science Conference. 2009(2027): 1-2. |
| [7] | Fristad F, Bussey D D J, Robinson M S, et al. Ideal landing sites near the lunar poles. Lunar and Planetary Science, 2004, Abstract, 1582. |
| [8] | Feldman W C, Maurice S, Lawrence D J, et al. Evidence for water ice near the lunar poles. Journal of Geophysical Research , 2001, 106(E10): 23231-23251. DOI:10.1029/2000JE001444 |
| [9] | Richard H R. Ice in the lunar polar regions revisited. Journal of Geophysical Research , 2002, 107(E2): 5011-5017. DOI:10.1029/2000JE001491 |
| [10] | Bussey D B J, Lucey P G, Steutel D, et al. Permanent shadow in simple craters near the lunar poles. Geophysical Research Letters , 2003, 30(6): 1278. |
| [11] | Margot J L, Campbell D B, Jurgens R F, et al. Topography of the lunar poles from radar interferometry: A survey of cold trap locations. Science , 1999, 284(5420): 1658-1660. DOI:10.1126/science.284.5420.1658 |
| [12] | Cook A C, Spudis P D, Robinson M S, et al. Lunar topography and basins mapped using a Clementine stereo digital elevation model. Lunar and Planetary Science, 2002, Abstract, 1281. |
| [13] | Araki H, Tazawa S, Noda H, et al. Lunar global shape and polar topography derived from Kaguya- lalt laser altimetry. Science , 2009, 323(5916): 897-901. DOI:10.1126/science.1164146 |
| [14] | Noda H, Araki H, Goossens S, et al. Illumination conditions at the lunar polar regions by Kaguya (Selene) laser altimeter. Geophysical Research Letters , 2008, 35: L24203. DOI:10.1029/2008GL035692. |
| [15] | Bussey D B J, Fristad K E, Schenk P M, et al. Constant illumination at the lunar north pole. Nature , 2005, 434(7035): 842-842. DOI:10.1038/434842a |
| [16] | De Weerd J F, Kruijff M, Ockels W J. Search for Eternally Sunlit Areas at the Lunar South Pole from Recent Data: New Indications Found. //49th International Astronomical Congress, Sept 1998, IAF-98-Q. 4. 07. |
| [17] | 欧阳自远, 李春来, 邹永廖, 等. 月探测工程的初步科学成果. 中国科学:地球科学 , 2010, 40(3): 261–280. Ouyang Z Y, Li C L, Zou Y L, et al. The primary science result from the Chang'E-1 probe. Sci. China (Earth Sci.) (in Chinese) , 2010, 40(3): 261-280. |
| [18] | 平劲松, 黄倩, 鄢建国, 等. 基于嫦娥一号卫星激光测高观测的月球地形模型CLTM-s01. 中国科学G辑 , 2008, 38(11): 1601–1612. Ping J S, Huang Q, Yan J G, et al. Lunar topographic model CLTM-s01 from Chang'E-1 laser altimeter. Sci. China (Series G) (in Chinese) , 2008, 38(11): 1601-1612. |
| [19] | 李春来, 任鑫, 刘建军, 等. 嫦娥一号激光测距数据及全月球DEM模型. 中国科学:地球科学 , 2010, 40(3): 281–293. Li C L, Ren X, Liu J J, et al. Laser altimetry data of Chang'E-1 and the global lunar DEM model./. Sci. China (Earth Sci.) (in Chinese) , 2010, 40(3): 281-293. |
| [20] | Li X Y, Wang S J, Zheng Y C, et al. Estimation of solar illumination on the Moon: a theoretical model. Planetary and Space Science , 2008, 56(7): 947-950. DOI:10.1016/j.pss.2008.02.008 |
| [21] | Tovar-Pescador J, Pozo-Vázquez D, Ruiz-Arias J A, et al. On the use of the digital elevation model to estimate the solar radiation in areas of complex topography. Meteorol. Appl. , 2006, 13(3): 279-287. DOI:10.1017/S1350482706002258 |
| [22] | Bussey D B J, Fristad K E, Schenk P M, et al. Constant illumination at the lunar north pole. Nature , 2005, 434(7035): 842. DOI:10.1038/434842a |
| [23] | Haruyama J, Ohtake M, Matsunaga T, et al. Lack of exposed ice inside lunar south pole Shackleton crater. Science , 2008, 322(5903): 938-939. DOI:10.1126/science.1164020 |
| [24] | Wessel P, Smith W H F. Free software helps map and display data. Eos Trans. AGU , 1991, 72(41). DOI:10.1029/90EO00319. |
| [25] | Wessel P, Smith W H H. The Generic Mapping tools (GMT) technical reference and cookbook. NOAA/NESDIS, 2009.0 |