 2010, Vol. 53
2010, Vol. 53


从20世纪80年代至今30余年来,GPS定位技术取得了飞速发展.目前,卫星导航定位技术GNSS(Global Navigation Satellites System)正朝着实时、高精度、高可靠性的方向发展.其中,精密单点定位(PPP)技术和网络RTK(Real Time Kinamatic)技术已成为卫星导航定位领域的前沿与热点[1, 2],也是目前乃至未来实时高精度动态定位的主要技术手段.当前,实时高精度定位服务系统主要有两类.一类是基于网络RTK技术的连续运行参考站系统(CORS).另一类是为解决CORS作业范围有限而建立的星基差分定位系统,如StarFire,OmniSTAR等[3~5],这类系统主要采用PPP技术.虽然这两种定位服务系统技术较为成熟,可靠性较高,但也存在一些不足.CORS系统可以在网内提供实时高精度定位服务,但作业范围有限.我国国土面积大,建立覆盖全国的CORS服务系统固然可以满足国民经济建设的定位需求,但总投资和运营成本相当高昂,至少从目前的条件来看,还不太现实.星基差分GPS依赖国外技术,且投资和运营成本较高[6].
因此,利用少量的IGS连续运行站网的实时观测数据流,基于互联网络,实时估计并播发精密卫星钟差改正及超快精密轨道产品,研发具有自主知识产权的实时精密单点定位系统,确保高精度定位的同时避免作业范围的限制,低密度基站分布可大大降低运营和维护成本,这将具有十分重要的现实意义和广泛的应用前景[7~13].目前国际上已有相关机构开展了这方面的研究,并在系统开发方面取得了一些初步成果[3~5, 8, 9].本文从系统设计角度分析了实时PPP系统的关键技术及其实现过程,在原有的事后精密动态/静态精密单点定位软件TriP基础上开展了实时精密卫星钟差估计和实时PPP研究,并扩展了软件系统,模拟仿真的实验结果表明该方法是可行的.
2 实时PPP系统设计所设计的实时精密单点定位系统由服务器端和用户端两个部分构成,二者通过实时网络通讯链路保持连接并完成数据交互.系统总体结构及数据流如图 1所示.服务器端负责播发实时精密单点定位需要的高精度实时精密卫星轨道和实时精密卫星钟差产品.目前,国际GNSS服务组织(IGS)提供的超快速精密轨道产品---IGU,其轨道精度较高,达到5 cm左右[1].因此,实时精密单点定位服务可直接采用IGS发布的预报轨道产品.但IGS发布的预报钟差产品精度较低(目前为5 ns左右),不能满足实时精密单点定位的要求.这就要求系统的服务器端能利用超快速卫星轨道产品和少量全球分布的实时连续运行参考站网连续、实时的观测数据流实时估计卫星钟差[1],并通过互联网络播发出去,提供给用户使用.

|
图 1 实时精密单点定位系统数据流 Fig. 1 Real-time PPP system data flow |
实时数据通讯是维持系统正常运行的核心模块,贯穿整个实时系统工作的各个环节.它的设计及实现关系到系统的可靠性及稳定性.目前NTRIP(Network TransPort of RTCM via Internet Protocol)协议已作为工业标准被广泛用于GNSS数据流的Internet网络传输.此协议支持的GNSS数据流包括GPS,GLONASS,Galileo,EGNOS,WASS等,数据格式包括RTCM、RTCA、SP3、RINEX、BINEX、SOC等.本系统播发的实时钟差产品等数据编码均采用该协议.各模块具体实现过程为:“实时数据流接收及同步模块”接收来自各个连续运行参考站网的实时GNSS观测数据,同时接收来自IGS的超快速精密轨道产品.系统采用TCP/IP协议,从Internet网络进行观测数据及精密轨道数据的传输.接收到观测数据后立即进行解码和时间同步,并作为服务器端实时卫星钟差估计的观测数据.“实时钟差数据播发模块”向用户端播发实时精密轨道、钟差等改正数据.系统先基于TCP/IP协议,通过Internet网络将数据传到移动通讯公司,再由通讯公司的基站基于GPRS网络向用户进行播发,用户也可以直接基于网络终端获取卫星轨道和钟差改正数据.“用户终端数据接收模块”一方面实时获取接收机数据并解码,另一方面实时通过GPRS网络或移动网络终端获取来自服务器端的实时轨道和钟差改正数据.
当然,连续运行参考站的实时观测数据流传输和服务器端的实时钟差解算会有一定时延,通常在3~5 s内能够完成,3~5 s的时间延迟不会影响系统的实时定位.因为卫星轨道变化比较有规律,且能保证足够的外推精度.尽管卫星钟差的变化比较复杂,但简单的线性外推10~20 s也可以确保足够的外推精度.因此,对于实时定位用户而言,上述数据传输和数据处理时延不会影响实时精密单点定位的应用[14].
3 实时卫星钟差估计及精度分析上文已经提到,实时精密单点定位需要高精度的实时轨道和高精度的实时卫星钟差.IGS发布的超快速轨道产品的精度已优于5 cm,可以外推,也能保证足够的精度,但目前还没有免费供大家使用的高精度实时精密钟差产品.因此,如何实时获取精密卫星钟差改正是实现实时PPP的关键技术与难点之一.本文基于参考站网的实时观测数据流实时估计精密卫星钟差,并通过互联网络向实时用户进行播发,实现实时PPP定位服务.目前网络通讯技术已经相当发达,实时向用户播发改正数据较易实现,本节主要讨论基于服务器端的实时估钟技术.与精密单点定位类似,实时精密估钟的基本思路是通过事先固定卫星轨道和地面跟踪站坐标,利用跟踪站网的实时观测数据流进行卫星钟差解算,求出卫星钟差改正参数.精密卫星钟差估计一般采用消电离层的非差组合相位和伪距观测值,其误差方程为(1~2)式:

|
(1) |

|
(2) |
式中:k为测站号,j为卫星号,i为相应的观测历元,C为真空中的光速;Δtk(i)为接收机钟差,Δtj(i)为卫星钟差;δρk,tropj(i)为对流层延迟误差;Nkj为站星间无电离层组合实数模糊度;εk,pj(i)、εk,Φj(i)为多路径、观测噪声等未模型化的误差;Pkj(i)、Φkj(i)为相应卫星、测站和历元的无电离层影响的组合观测值,而vk,pj、vk,Φj为残差,λ为相应的波长;ρkj为信号发射时刻的卫星位置到信号接收时刻接收机位置之间的几何距离.
误差方程(1~2)式中,既含有接机钟差又含有卫星钟差,直接利用相位和伪距观测值不能同时解求这两套钟差,因此须先固定某一基准钟(卫星钟或接收机钟),然后确定其他接收机和卫星与所选定基准钟间的相对钟差.本文选择估钟参考站网(图 2所示)中一个地面跟踪站NICO站的接收机钟作为基准钟,利用全球40个IGS跟踪站网的实时观测数据估计卫星钟差和其他站点接收机钟差.在确保基准接收机钟稳定可靠的前提下,采用这种方法是简单有效的[15, 16].

|
图 2 用于实时估钟的IGS跟踪站网分布图 Fig. 2 IGS stations distribution for satellite clock correction estimation in real time |
基于上述IGS跟踪站网的非差观测数据,采用卡尔曼滤波实时估计精密卫星钟差.使用的观测值、误差改正方法及参数处理策略如表 1所示.
|
|
表 1 实时精密卫星钟差估计策略 Table 1 Strategy for real-time precise satellite clock correction estimation |
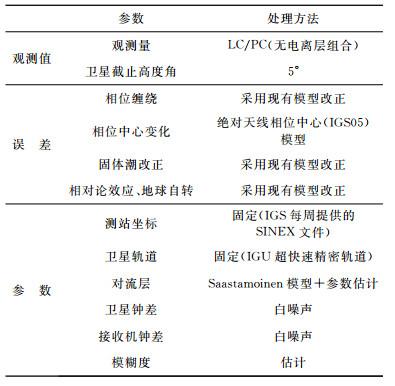
为了评价实时精密卫星钟差的精度,我们将实时估计得到的30 s间隔的精密卫星钟差同IGS分析中心之一---CODE发布的30 s间隔的事后精密钟差进行比较.由于二者基准钟选择不同导致两套钟差值之间存系统性偏差,但是这种系统性偏差在定位中被模糊度和接收机钟差吸收,不影响最终定位结果.在分析实时估计的卫星钟差与CODE事后精密卫星钟差的符合程度时,可扣除该系统偏差.因此,本文以2号卫星钟作为基准钟(在此时间段内1号卫星由于故障停止服务),将实时估计的卫星钟差与CODE事后卫星钟差作差以评定其精度.并按(3)式计算实时精密卫星钟差的RMS值.
|
(3) |
式中,Δi为第i个历元两套卫星钟差之差,
我们采用了全球若干均匀分布的测站的观测数据进行实时精密钟差估计.图 3~4给出了两组实时估钟的实验结果,其中图 3是利用2008年年积日为184全球40个IGS跟踪站的实时估钟结果(简称“方案一”)与CODE事后精密卫星钟差互差的RMS;图 4是利用2009年年积日为67全球40个IGS跟踪站的实时估钟结果(简称“方案二”)与CODE事后精密卫星钟差互差的RMS.

|
图 3 方案一中实时钟差与CODE钟差互差的RMS Fig. 3 Case one:RMS of the difference between real-time satellite clock and post satellite clock provided by CODE in 2008 |

|
图 4 方案二中实时钟差与CODE钟差互差的RMS Fig. 4 Case two:RMS of the difference between real-time satellite clock and post satellite clock provided by CODE in 2009 |
图 3和图 4表明,利用全球40个IGS跟踪站实时估计得到的卫星钟差与CODE事后精密卫星钟差具有较好的一致性,大部分优于0.1 ns,最大偏差不超过0.2 ns.少数卫星钟差较大,这可能与卫星自身特性有关,比如发射年限、卫星型号及卫星钟类型等因素.但总体而言,在系统服务器端利用全球一定数量大致均匀分布的跟踪站的观测数据估计出的实时卫星钟差与CODE事后精密钟差具有较高的外符合精度,二者互差约为0.1 ns.相关研究表明,当选择用于估钟的跟踪站达到40个左右时,再增加跟踪站的数目对精密卫星钟差估计的精度不会有明显的改善,但是,参考站的优化选择可能是影响精密卫星钟差估计精度的因素之一,这有待于今后进一步研究论证.
4 实时精密单点定位及精度分析正如上文所述,实时精密单点定位的关键在于实时获取精密卫星钟差改正和高精度的卫星轨道.实时精密轨道可以直接利用IGS发布的超快速精密星历,其轨道预报精度优于5 cm,完全能够满足实时PPP的精度要求.实时精密卫星钟差改正由服务器端计算.实时精密轨道和实时精密钟差通过网络通讯链路播发给接入的实时精密单点定位用户使用.客户端在获取由服务器端发送的实时精密卫星钟差和精密卫星轨道后,就可以快速进行实时精密单点定位解算,其算法同事后PPP基本类似,软件算法流程如图 5所示[1, 2].

|
图 5 实时PPP算法流程 Fig. 5 Algorithm flow of real-time PPP |
为便于分析,我们采用模拟播发和模拟接收IGU预报星历和实时精密卫星钟差的方式,结合实测数据进行实时精密单点定位解算,并对其定位精度进行分析.图 6给出了2008年5月12日(年积日为133)国内BJFS和SHAO两个IGS跟踪站实时动态PPP的结果与IGS提供的参考坐标的互差,图 7为2009年3月8日国外AUCK与BRUS站实时动态PPP解算的站坐标与参考坐标的互差,图中三角形、方形、星形依次代表N、E、U(北、东、天)三方向的定位偏差.

|
图 6 BJFS和SHAO跟踪站实时动态精密单点定位结果(2008年) Fig. 6 The real-time kinematic PPP results of BJFS and SHAO station (2008) |

|
图 7 AUCK与BRUS跟踪站实时动态精密单点定位结果(2009年) Fig. 7 The real-time kinematic PPP results of AUCK and BRUS station (2009) |
图 6~7表明,在实时PPP收敛之前,定位结果较差,精度仅为dm级.经过15~30 min的初始化后,定位结果逐渐收敛.且平面方向的定位精度明显要好于高程方向,高程方向存在一定的抖动,这可能与所选对流层延迟改正模型及参数估计方法有关.但总体上,在大约30 min后定位结果达到收敛,且收敛之后水平方向的定位精度优于5 cm,高程方向优于10 cm.在实际应用中,这种优于1 dm的定位精度可以满足许多实时定位用户的需求.
为进一步评价实时精密单点定位的应用前景,我们将实时估计得到的精密卫星钟差应用于地震同震位移计算.以2008年5月12日汶川大地震为例,选择重庆CORS和成都CORS站的观测数据模拟实时精密单点定位.限于篇幅,本文仅给出其中较有代表性的BISH站(观测数据采样间隔为1 s)和CDKC站(观测数据采样间隔为15 s)的定位结果. 图 8中,从上至下依次为BISH站滤波前、滤波后以及CDKC站滤波前东-西方向的同震位移随时间的变化曲线.由于是在连续运行参考站上模拟实时精密单点定位,经过较长时间的连续运行,实时滤波定位结果已经收敛.为方便提取地震形变信号,图 8中仅截取了地震时刻前后各15min的滤波定位结果进行分析.

|
图 8 汶川地震期间重庆的BISH站及成都CDKC站E方向的同震位移信号 Fig. 8 Coseismic displacement on east component of BISH and CDKC station |
由图 8a知,重庆CORS的BISH站在地震前后E方向存在较明显的同震位移信号,其位移量达到5 cm左右,但受噪声的影响,我们无法确切地分析地震波的频谱特性,因此,在提取同震位移信号时,为消除噪声影响,可进一步对原始同震位移时间序列进行0.15~0.45 Hz的带通滤波,滤波结果如图 8b所示,此时,地震同震位移信号就能清晰地显现出来.受采样间隔的限制,尽管成都CORS的CDKC站也能清晰地反映地震前后的位移变化,如图 8c所示,但15 s间隔的采样数据,它只能反映频率低于0.067 Hz的低频波,而地震时刻的高频地震波未能被采样.比较BISH站与CDKC站的实时精密单点定位结果不难发现,BISH站仅在地震发生后若干历元发生较小幅度的抖动,之后便恢复至与原始位置相近.而CDKC站在地震发生时刻发生剧烈的地表形变,且之后与初始位置相差1~2 dm,这说明该站已经被地震破坏,偏离了原始位置.因此,采用实时精密单点定位的方法在一定程度上能够满足地震监测的应用需求.
5 结语本文详细讨论了实时精密单点定位中若干关键技术及其解决方案,实现了基于服务器的实时精密单点定位系统.实时估计得到的精密卫星钟差与CODE事后精密钟差具有较好的一致性,将其应用于实时精密单点定位取得了平面方向为5 cm,高程方向为10 cm左右的实时定位结果.并对汶川地震期间震区高采样率的GPS观测数据进行了处理,有效探测出了地面同震位移信号.因此,基于服务器的实时精密单点定位能够在有网络通讯覆盖的全球区域内实现实时、高精度和全天候的动态定位,且运营成本相对低廉,可在海上作业、地震监测、军事指挥、交通运输、灾害预警、精细农业等众多潜在领域推广应用.
| [1] | Zumberge J F, Heflin M B, Jefferson D C, et al. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J Geophys Res , 1997, 102(B3): 5005-5017. DOI:10.1029/96JB03860 |
| [2] | Kouba J, Héroux P. Precise point positioning using IGS orbit and clock products. GPS Solut , 2001, 5(2): 12-28. DOI:10.1007/PL00012883 |
| [3] | Dixon K. StarFireTM: a global SBAS for sub-decimeter precise point positioning. ION GNSS 19th International Technical Meeting of the Satellite Division. Fort Worth, Texas. 2006. 2286~2296 http://www.academia.edu/7084845/Satellite_Radiolocalization_From_GPS_to_GNSS_and_Beyond_Novel_Technologies_and_Applications_for_Civil_Mass_Market |
| [4] | 冯林刚, 赵永贵. 星基差分GPS--StarFire系统. 测绘通报 , 2006(11): 6–8. Feng L G, Zhao Y G. Star-based differential GPS system-StarFire. Bulletin of Surveying and Mapping (in Chinese) , 2006(11): 6-8. |
| [5] | About OmniSTAR Worldwide DGPS Service. http: //www. omnistar. com/about.html |
| [6] | Wübbena G, Schmitz M, Bagge A. PPP-RTK: precise point positioning using state-space representation in RTK networks. 18th International Technical Meeting, ION GNSS-05. 2005: Long Beach, California |
| [7] | Kouba J. A guide to using International GNSS Service (IGS) products [online]. 2009: IGS Central Bureau May 2009 Avail at http: //igscb. jpl. nasa. gov/igscb/resource/pubs/UsingIGSProductsVer21. pdf. Accessed 11 June 2009 |
| [8] | Ge M R, Chen J, Gendt G. EPOS-RT: software for real time GNSS data processing. General Assembly European Geosciences Union. Vienna, Austria, 2009 |
| [9] | Shi C, Zhao Q L, Geng J H, et al. Recent development of PANDA software in GNSS data processing. International Conference on Earth Observation Data Processing and Analysis (ICEODPA). Wuhan, China: SPIE. 2008 |
| [10] | Gao R, Meng X, Geng J, et al. Application of real-time precise point positioning and GIS for rail track deformation monitoring of the Qinghai-Tibet Railway. 2008 Proceedings of the 11th International IEEE Conference on Intelligent Transportation Systems, Beijing, 2008, ITSC. 693~698 |
| [11] | Chen K. Real-time precise point positioning and its potential applications. In: Proceedings of 17th Int Tech Meet Satellite Div Inst Navigation GNSS, 21-24, September, 2004. Long Beach, CA, USA |
| [12] | Bisnath S, Gao Y. Current state of precise point positioning and future prospects and limitations. International Association of Geodesy Symposia , 2008, 133: 615-623. DOI:10.1007/978-3-540-85426-5 |
| [13] | Geng J, Teferle F N, Meng X, et al. Kinematic precise point positioning at remote marine platforms. GPS Solut , 2010: 1521-1886. DOI:10.1007/s10291-0090157-9 |
| [14] | Ray J, Griffiths J. Status of IGS ultra-rapid products for realtime applications. AGU Fall Meeting Abstracts, 2008 |
| [15] | Lou Y D, Shi C, Ge M R, et al. Determination of GPS real time precise clock offset. International Conference on Earth Observation Data Processing and Analysis (ICEODPA). Wuhan, China: SPIE. 2008 (7285) |
| [16] | 楼益栋.导航卫星实时精密定轨与钟差确定[博士论文].武汉:武汉大学测绘学院, 2008 Lou Y D. Research on real-time precise GPS orbit and clock offset determination[Ph.D.thesis](in Chinese). Wuhan: School of Geodesy and Geomatics, Wuhan University, 2008 |